This year’s ARC (Aerial Robotics Control) projects features a robot, hanging from a ferromagnetic ceiling, able to support itself and move horizontally through the repetitive act of launching an electromagnet-tipped appendage at the ceiling and detaching another once the first is secured. Through doing so a series of times, the robot is able to effectively translate parallel to the ceiling through this series of angled launches.
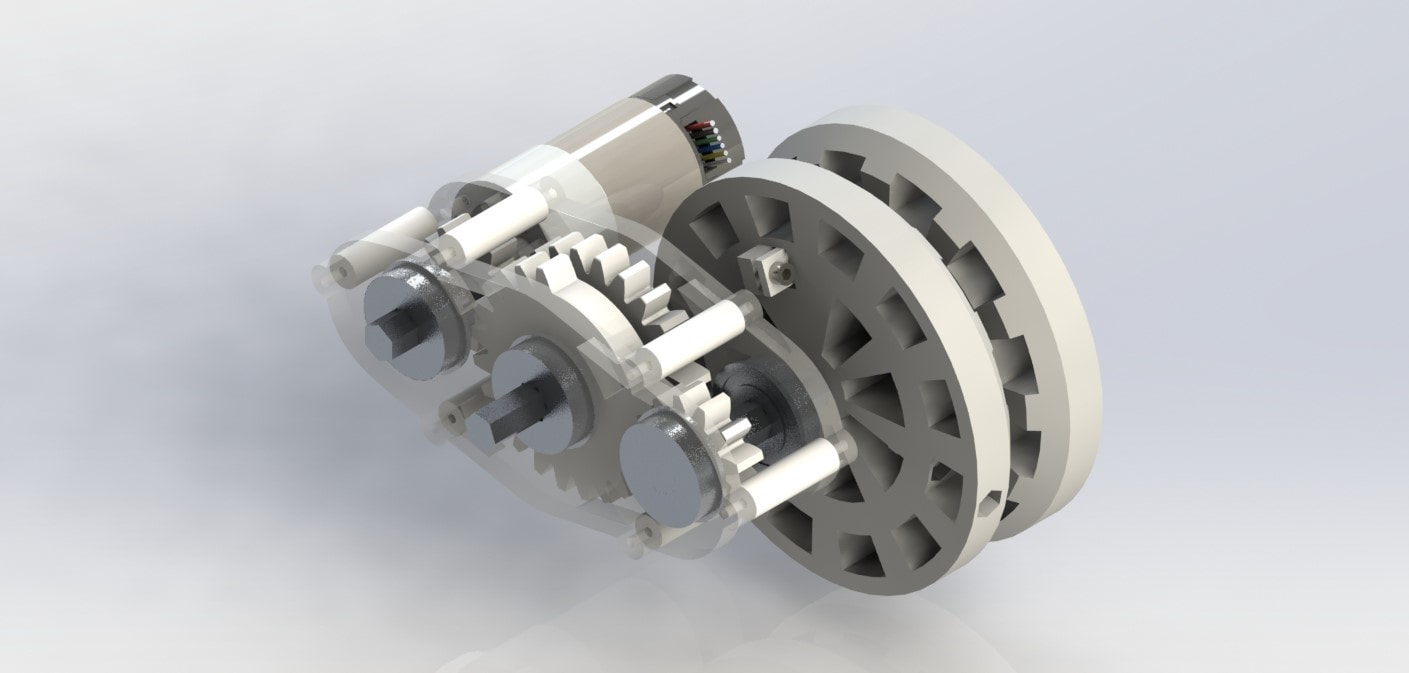
Additional analysis done on gear
Additional analysis done on gear
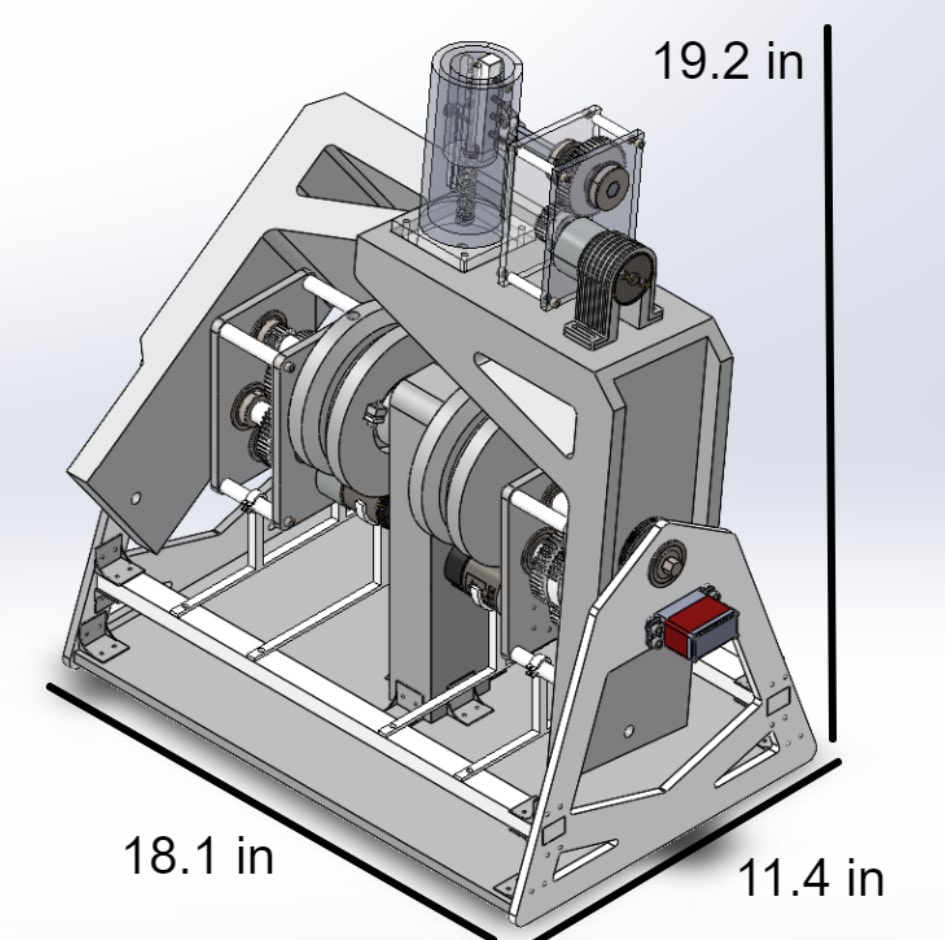
2020-2021 ARC Robot
Launcher
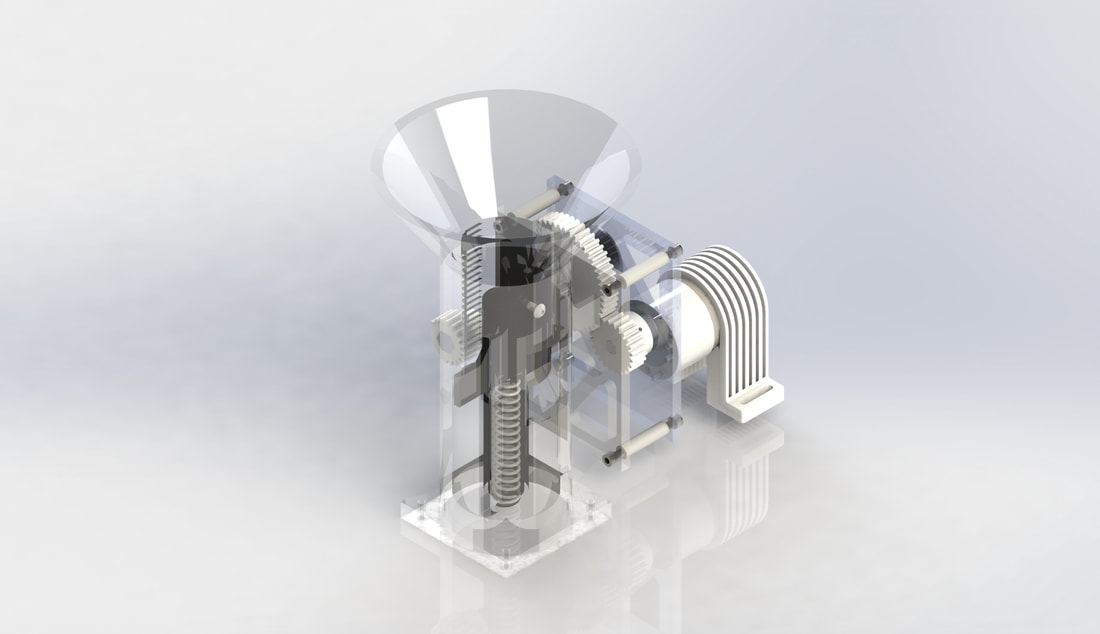
Reeler